A szonár egy távolságmérő eszköz, ami ember által nem hallható hanghullámokkal működik általában. Egyes 80-as években készült Polaroid fényképezőgépek szonárt használnak a fókuszáláshoz. Például a 660-as kamera is, amit egy-tízezer forintért használtan megvehetünk aukciós oldalakról (ebay, vatera, teszvesz). A szonár egy külön modul, ami könnyedén kiszerelhető és egy mikrokontrollerrel vezérelhető.
{kind=link}

Ha pedig sikerül életre kelteni nagyon sok mindenre használható: távolságmérő kézi készülékhez, egy riasztóhoz behatolásjelzőnek vagy egy kis robotjármű érzékelőjének.
 {width="144"
height="108"}
{width="144"
height="108"}
 {width="108"
height="144"}
{width="108"
height="144"}
Az eszköz a delfinek és denevérek hanglokátorát „utánozza”. Egy speciális hangszóróból ultrahangot bocsát ki, ez a hang visszaverődik a legközelebbi tárgyról és ugyanaz a hangszóró veszi a hullámokat. A küldés és vétel között eltelt időből kiszámolható a távolság, ha tudjuk, hogy milyen sebességgel haladnak a hanghullámok a levegőben. Ez a sebesség 25 °C-on körülbelül 346 méter másodpercenként, -10 °C-on már csak 325 m/s. s = v_hang * t / 2 Ahol „s” a szonár és a tárgy közötti távolság, „v_hang” a hangsebesség és „t” az idő. Kettővel azért kell osztani, mert a hang az utat kétszer járja be: oda-vissza megy. Elvi működés
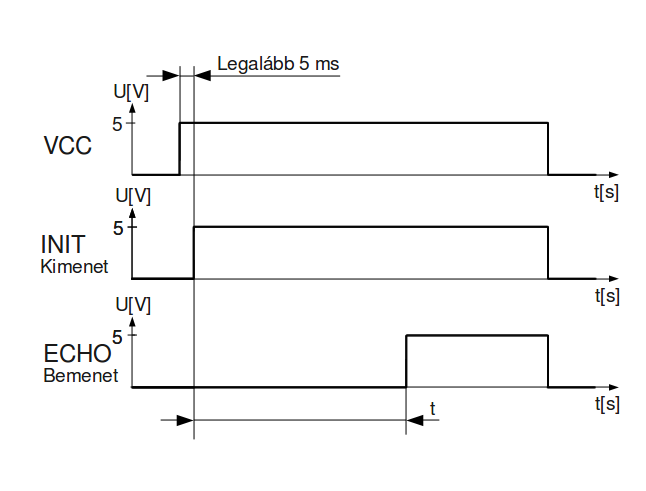
A kamerában levő szonár modul fél métertől körülbelül 7,5 méterig tud mérni. Négy vezetéken keresztül vezérelhetjük: GND, INIT, ECHO és VCC. A GND a föld, a VCC az 5V-os tápfeszültség. A tápfeszültség bekapcsolása után 5 ms-ot várni kell, míg a modul oszcillátorai stabilizálódnak. Ezután az INIT lábra adott magas szintű jel hatására küld el a modul egy hangimpulzust. (Ez egyben körülbelül 200V feszültség megjelenését is jelenti, vagyis nem érdemes kézzel a hangszóró kivezetéseihez érni.) Az INIT lábat a mérés végéig H szinten kell tartani. Az ECHO lábon megjelenő felfutó él jelzi a vett visszahangot. Tehát a képletben szereplő „t” idő az INIT és az ECHO lábon megjelenő felfutó élek között eltelt idő. A mérés végén az INIT lábat L szintre kell állítani és a tápfeszültséget is ki kell kapcsolni, ha új mérést szeretnénk végezni!
Gyakorlatilag „csak” az adást kell elindítanunk, várnunk amíg a visszhang visszatér és kiszámolnunk a távolságot. Ehhez egy Atmel ATMEGA88-as mikroszámítógépet használtam fel és egy Proxima-01 típusú LCD-n jelenítettem meg a távolságot. A forráskód fordítható úgy is, hogy soros vonalra írja ki.
Ide vele!Kapcsolási rajz: sonar_schematic.pdf
Eagle kapcsolási rajzok és NYÁK tervek: atmega88p_sonar_eagle.zip
Forráskód: atmega88p_sonar.zip atmega88p_sonar.tar.gz
Forráskód dokumentációja itt is olvasható, de az előbbi tömörített fájlok is tartalmazzák.
Forrás: